PROYECTO DE ROBÓTICA INDUSTRIAL


PROCESO AUTOMATIZADO DE MECANIZADO DE
LLANTAS DEL AUTOMÓVIL
INDICE
2.FUNCIONAMIENTO
Realiza la eliminación de rebabas y un acabado mejor en el interior de la llanta y en el perfil exterior.


Realiza los agujeros para el anclaje de la llanta al automóvil y el agujero para la válvula de inflado.

3.1 ROBOTS Y SUS ELEMENTOS
LLANTAS DEL AUTOMÓVIL
1. Introducción.
2. Funcionamiento.
3. Elementos empleados
3.1 Robots y sus elementos
. 3.2 Otros elementos de la celda.
. 3.2 Otros elementos de la celda.
3.3 Máquinas CNC.
3.4 Elementos de seguridad.
4. Simulación
5. Programación en Workvisual.
6. Archivos descargables.
1. INTRODUCCIÓN
Este proyecto consiste en la creación de una celda robótizada compuesta por máquinas CNC y brazos robóticos principalmente, para el sector industrial de la automoción.
Esta celda formará parte del proceso industrial de la fabricación de llantas de aluminio del automóvil por fundición.
En este proceso las llantas salen de los moldes con rebabas y sin agujeros para los tornillos para su colocación en el automóvil y el de la válvula de inflado, con lo cual, el objetivo de este proyecto es la creación de una celda robótizada para realizar una serie de procesos de mecanizado para la eliminación de las rebabas y la realización de dichos agujeros y un acabado mejor antes de pasar por el proceso de acabado final de estas.
2.FUNCIONAMIENTO
1. Una vez que el proceso de fundición y moldeo de las llantas de aluminio a mecanizar en esta celda se ha realizado, las llantas serán introducidas en la celda por una cinta transportadora hasta llegar al final de su recorrido.
2. El primer robot será el encargado de coger las llantas de la cinta transportadora y realizar la carga y descarga en las maquinas CNC 1 y CNC 2 para su respectivo mecanizado.
Una vez que el proceso de mecanizado en la máquina CNC 2 ha finalizado el primer robot coge la llanta y la colocará en una base que agarra la llanta .
3. El segundo robot es el encargado de coger la llanta de la base anterior y colocarla en la máquina CNC 3. Una vez finalizado el mecanizado en esta última CNC el robot cogerá la llanta y la pasará por una columna de aire a presión para realizar la limpieza de las llantas quitando el resto de virutas, taladrina, etc y a continuación la dejará en otra cinta para la salida de estas llantas de la celda y que pasen al siguiente proceso de fabricación.
El mecanizado que realiza cada máquina CNC son los siguientes:

El mecanizado que realiza cada máquina CNC son los siguientes:
- CNC 1
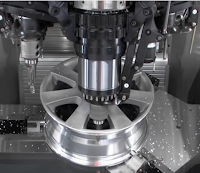
Realiza la eliminación de rebabas y un acabado mejor en la parte superior de la llanta y en el perfil superior.

- CNC 2.
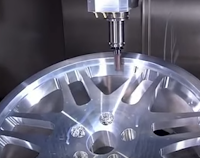
Realiza la eliminación de rebabas y un acabado mejor en el interior de la llanta y en el perfil exterior.


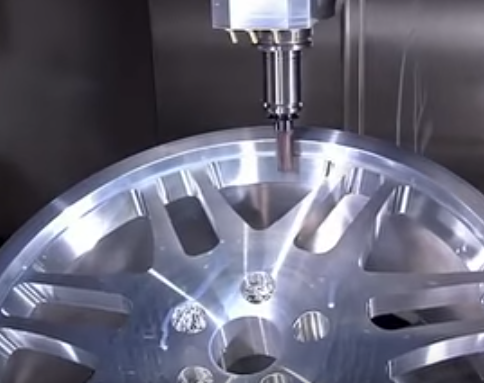
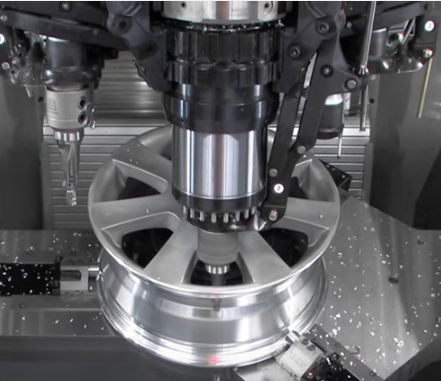
- CNC 3.
Realiza los agujeros para el anclaje de la llanta al automóvil y el agujero para la válvula de inflado.

3.ELEMENTOS EMPLEADOS
3.1 ROBOTS Y SUS ELEMENTOS
3.1.1 Los robots empleados serán de la marca KUKA modelo KR 60 – 3 con las siguientes características:
El KR 60-3 es un artista del movimiento que abarca un espacio de trabajo esférico y resulta ideal para aquellos conceptos de instalación en los que se busca un ahorro de espacio y de costes.
|

3.1.2 El armario de control utilizado para cada robot será el KRC4. Algunas de sus características son:
- mayor rendimiento, seguridad y flexibilidad.
- una arquitectura de sistema completamente nueva y claramente estructurada que se concentra en estándares de datos abiertos y de alto rendimiento.
- Una arquitectura en la que todos los controles integrados (seguridad, robot, movimiento y lógica) disponen de una base de datos y una arquitectura comunes que aprovechan y comparten de forma inteligente. Con el fin de obtener máximo rendimiento, escalabilidad y flexibilidad. En el presente y en el futuro, y no sólo para KUKA Roboter.

3.1.3 Para la realización de la programación online de los robots usaremos la programadora KUKA SMARTPAD.

3.1.4 Para la programación offline y simulación usaremos el software de KUKA llamado KUKA SIM PRO 1.1 y WORKVISUAL.
3.1.5 Eje externo de KUKA KL 250.
Para el desplazamiento del primer robot hacia las máquinas CNC instalaremos el robot sobre un eje externo modelo KL250.

3.1.6 Pinza para agarre de llantas.
Para el agarre de las llantas instalaremos en el robot una pinza específica.

3.2 OTROS ELEMENTOS DE LA CELDA.
3.2.1 Columna de aire.
Se empleará esta columna de aire para la limpieza de las llantas una vez finalizado su mecanizado.

3.2.2 Base para intercambio.
Para el intercambio de la llanta de un robot a otro se usará esta base. Dispone de agarres para que la llanta al ser colocada en ella se agarre y quede bien centrada y evitar su posible caída al suelo.
3.2.3 Cintas transportadoras.
Para la entrada y salida de llantas de la celda.

3.3 MÁQUINAS DE MECANIZADO CNC.
Para el proceso de mecanizado usaremos tres máquinas CNC modelo V-50L de la marca Leadwell.

3.4 ELEMENTOS DE SEGURIDAD.
Para garantizar la seguridad de la celda robótizada se han introducido los siguientes sistemas de seguridad:
3.4.1 Vallas metálicas.
Se ha realizado un cerramiento mediante vallas metálicas alrededor de las robots y máquinas empleadas en este proceso garantizando así el impedimento de entrada de personas en la celda durante el funcionamiento.

· 3.4.2 Puerta metálica con dispositivo de seguridad con bloqueo.
Se ha introducido una puerta metálica para acceder a la celda. Esta puerta tendrá un interruptor de seguridad con dispositivo de bloqueo haciendo que el pestillo quede bloqueado durante el funcionamiento de la celda. Si durante el funcionamiento se consiguiera abrir esta puerta el sistema se detendrá por completo.
Solo se podrá acceder a la celda desbloqueando este dispositivo mediante pulsadores paros de emergencia,etc.
Como existe riesgo de que una persona quede atrapada dentro de la celda por el cierre de la puerta y su bloqueo de forma accidental, se instalará un dispositivo para poder abrirla desde el interior de la celda también.

3.4.3 Sistema muting.
Se empleará sistemas muting con conexionado en serie de los sensores, en las cintas transportadoras de entrada y salida de llantas.

3.4.4 Balizas de señalización.
Se emplearan balizas en la entrada de la celda para la señalización del estado de la celda (parada, funcionamiento, fallo, etc ).
También emplearemos balizas situadas encima de las cintas para señalizar el muting y el estado de las cintas.

3.4.5 Panel de mando.
Se dispondrá de un panel de mando en la puerta de la entrada equipado con un accionamiento de marcha, otro de paro y una seta de emergencia.

3.4.5 Módulo programable de seguridad.
para obtener la categoría 4 de seguridad (norma UNE EN 954) se ha instalado un modulo de seguridad programable para supervisar cada uno de los elementos de seguridad distribuidos por la celda.Estos elementos irán conectados uno a uno en el módulo.

4.SIMULACIÓN.
5.PROGRAMACIÓN
4.1 Programación robot 1.



4.2 Programación robot 2.


6.ARCHIVOS DESCARGABLES.
No hay comentarios:
Publicar un comentario